Dans la lignée de ma boîte à boutons je me suis attaqué à la construction d'un altimètre codeur le plus petit possible.
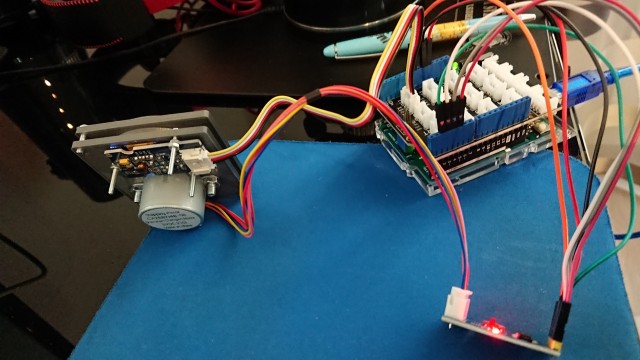
Il se compose d'une Arduino Uno, d'un moteur pas à pas 28BYJ48 (l'interface entre l'Arduino Uno et le moteur est un ULN2003A) et d'un écran Oled de 0.96" (128*64 pixels). L'habillage est réalisé en imprimante 3D (PLA) et sont de ma conception
Pour le moment c'est un prototype: je n'ai pas fixé le micro-switch qui permet la détection du "zéro" du moteur pas à pas et il n'y a pas de potar pour régler la pression de référence...
Néanmoins ça marche plutôt pas mal comme vous pouvez le voir dans cette petite vidéo :
Elle montre le passage à plusieurs altitudes en monté et en descente. Pour le moment les altitudes sont envoyées par la liaison série de l'Arduino mais à terme je voudrais l'interfacer avec les simulateurs que j'utilise.
Cette vidéo permet aussi de voir une des limites du montage : la vitesse maximale du moteur pas à pas qui est trop basse. Malheureusement je ne peux rien y faire en soft, c'est le matériel qui me limite : il faudra que je remplace ce moteur par un autre plus véloce dans la version définitive.
Il est donc possible que je finisse par utiliser ce proto avec une petite centrale inertielle équipée d'un capteur de pression atmosphérique (en ce cas la vitesse de l'aiguille ne risque pas de me gêner, je ne marche pas si vite que ça !).
Quelques photos en plus :
L'intégralité du montage
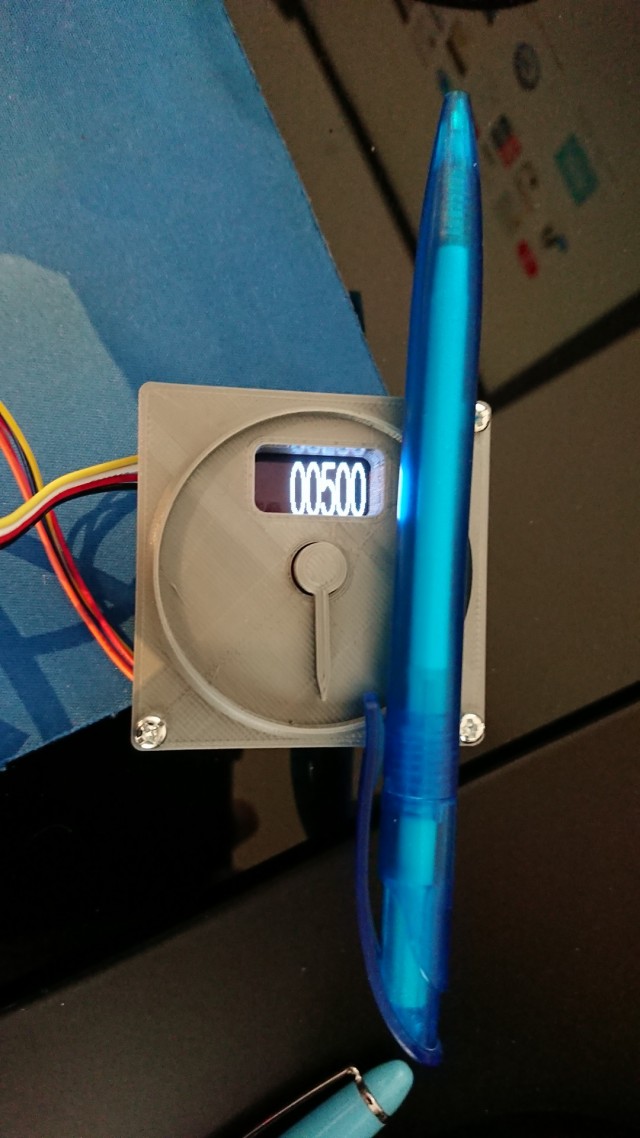
Vue de face :

Vue de face avec un stylo pour donner une idée de la taille :