Construction du Pit à Myoda


Re: Construction du Pit à Myoda
#101
Core i5-4690K @ 3.5 GHz - 8Go RAM - Carte graphique GTX 970 - (Cougar + FSSB) - TPR - W10 64bits sur SSD - EdTracker - Un pit
Re: Construction du Pit à Myoda
#102Salut,
Petite mise à jour du programme. J'ai modifié la génération du code Arduino (petite amélioration du code) et j'ai intégré le caution Panel.
J'ai testé d'ailleurs, c'est une merveille !
Téléchargeable toujours à la même adresse.
En revanche, je peux te dire que cette librairie fonctionne très bien si tu souhaite contrôler un seul moteur avec accélération.
La version multistepper ne prend pas en compte ce paramètre.
Jette un oeil ici : http://www.airspayce.com/mikem/arduino/ ... tated.html
La doc est franchement super bien faite avec plein d'exemples en tout genre !
Demande moi si tu ne comprend pas quelque chose après avoir lu des exemples
Petite mise à jour du programme. J'ai modifié la génération du code Arduino (petite amélioration du code) et j'ai intégré le caution Panel.
J'ai testé d'ailleurs, c'est une merveille !
Téléchargeable toujours à la même adresse.
Oula, te faire un petite tutoriel, ca risque d'être compliqué.Poker a écrit :Salut Myoda,
Peux tu nous faire un mini tutorial pour utiliser la librairie accelstepper ?
Merci d'avance
A=
En revanche, je peux te dire que cette librairie fonctionne très bien si tu souhaite contrôler un seul moteur avec accélération.
La version multistepper ne prend pas en compte ce paramètre.
Jette un oeil ici : http://www.airspayce.com/mikem/arduino/ ... tated.html
La doc est franchement super bien faite avec plein d'exemples en tout genre !
Demande moi si tu ne comprend pas quelque chose après avoir lu des exemples
L'histoire du pit sur Checksix : viewtopic.php?f=286&t=192908
Télécharger mon programme : http://f4toserial.com
La chaîne Youtube : https://www.youtube.com/channel/UChAv6B ... 1J7oDf-W1w
Les photos du cockpit : https://photos.app.goo.gl/BqyyyjkKzo2ZjdoF9
Télécharger mon programme : http://f4toserial.com
La chaîne Youtube : https://www.youtube.com/channel/UChAv6B ... 1J7oDf-W1w
Les photos du cockpit : https://photos.app.goo.gl/BqyyyjkKzo2ZjdoF9


Re: Construction du Pit à Myoda
#103Salut ,
C bien trop compliqué pour moi...
J'ai mis les fichiers AccelStepper.h et .cpp dans le répertoire adéquate.
Après dans le code arduino j'ai remplacé include SwitecX25 par Accelstepper. .
lorsque je fais vérifié le code il y a plein d'erreur ce qui est je pense normal mais je ne sais pas les corriger .
Pourrais tu mettre ton code Arduino pour la pression d'huile seulement par exemple ?
Merci encore désolé pour les questions bêtes..
C bien trop compliqué pour moi...
J'ai mis les fichiers AccelStepper.h et .cpp dans le répertoire adéquate.
Après dans le code arduino j'ai remplacé include SwitecX25 par Accelstepper. .
lorsque je fais vérifié le code il y a plein d'erreur ce qui est je pense normal mais je ne sais pas les corriger .
Pourrais tu mettre ton code Arduino pour la pression d'huile seulement par exemple ?
Merci encore désolé pour les questions bêtes..
Re: Construction du Pit à Myoda
#104Salut la team.
Je vous présente F4ToArduino !

C'est pratiquement le même programme que l'autre dont je ne poursuivrai plus le développement car je me concentre sur celui-ci !
Pour deux raisons !
La première, c'est qu'à terme, cet application transférera directement le code dans la carte Arduino ! plus besoin d'un éditeur !
La deuxième raison, c'est qu'en utilisant moi même le programme je me suis vite rendu compte qu'à partir de 2 cartes Arduinos, c'est assez compliqué ! Les données ne sont pas sauvegardées et on ne peut pas importer des profils ! Maintenant c'est réglé. On peux créer des profils et importer ou exporter les paramètres !
On peux donc lancer plusieurs instances de l'application avant de lancer F4 !
Bref, l'application est toujours accessible au même endroit !
Il faut les importer via l'interface Arduino ! Pour cela, clique sur : Croquis -> Include Library -> Add .ZIP Library.
Ensuite seulement ta ligne #include sera valable (ex #include <LiquidCrystal.h>)
Je vous présente F4ToArduino !
C'est pratiquement le même programme que l'autre dont je ne poursuivrai plus le développement car je me concentre sur celui-ci !
Pour deux raisons !
La première, c'est qu'à terme, cet application transférera directement le code dans la carte Arduino ! plus besoin d'un éditeur !
La deuxième raison, c'est qu'en utilisant moi même le programme je me suis vite rendu compte qu'à partir de 2 cartes Arduinos, c'est assez compliqué ! Les données ne sont pas sauvegardées et on ne peut pas importer des profils ! Maintenant c'est réglé. On peux créer des profils et importer ou exporter les paramètres !
On peux donc lancer plusieurs instances de l'application avant de lancer F4 !
Bref, l'application est toujours accessible au même endroit !
Je crois que c'est une méprise. Tu ne dois pas ouvrir les archives zip toi même mais les importer dans l'interface et laisser Arduino se débrouiller seul.Poker a écrit :Salut ,
J'ai mis les fichiers AccelStepper.h et .cpp dans le répertoire adéquate.
Après dans le code arduino j'ai remplacé include SwitecX25 par Accelstepper. .
lorsque je fais vérifié le code il y a plein d'erreur ce qui est je pense normal mais je ne sais pas les corriger .
Pourrais tu mettre ton code Arduino pour la pression d'huile seulement par exemple ?
Merci encore désolé pour les questions bêtes..
Il faut les importer via l'interface Arduino ! Pour cela, clique sur : Croquis -> Include Library -> Add .ZIP Library.
Ensuite seulement ta ligne #include sera valable (ex #include <LiquidCrystal.h>)
L'histoire du pit sur Checksix : viewtopic.php?f=286&t=192908
Télécharger mon programme : http://f4toserial.com
La chaîne Youtube : https://www.youtube.com/channel/UChAv6B ... 1J7oDf-W1w
Les photos du cockpit : https://photos.app.goo.gl/BqyyyjkKzo2ZjdoF9
Télécharger mon programme : http://f4toserial.com
La chaîne Youtube : https://www.youtube.com/channel/UChAv6B ... 1J7oDf-W1w
Les photos du cockpit : https://photos.app.goo.gl/BqyyyjkKzo2ZjdoF9
Re: Construction du Pit à Myoda
#105C'est du super boulot tout ça. Pas encore essayé mais cela viendra en temps utile....
Core i5-4690K @ 3.5 GHz - 8Go RAM - Carte graphique GTX 970 - (Cougar + FSSB) - TPR - W10 64bits sur SSD - EdTracker - Un pit
Re: Construction du Pit à Myoda
#106Merci Myoda. 
Tu peux nous mettre le lien pour le télécharger.
Repman
Tu peux nous mettre le lien pour le télécharger.
Repman
TrackIR V4 + TrackClip Pro / HOTAS Cougar - FFSB R1 - Throttle effet Hall/ Beyerdynamic MMX300 / MSI Z97 gaming 5/ Nvidia Gigabyte GTX 1080Ti / Intel core i5-4690K / Windows 10 / RAM DDR3 32GB / SSD Samsung 840 Pro 256 Go
Re: Construction du Pit à Myoda
#107Voila !
L'histoire du pit sur Checksix : viewtopic.php?f=286&t=192908
Télécharger mon programme : http://f4toserial.com
La chaîne Youtube : https://www.youtube.com/channel/UChAv6B ... 1J7oDf-W1w
Les photos du cockpit : https://photos.app.goo.gl/BqyyyjkKzo2ZjdoF9
Télécharger mon programme : http://f4toserial.com
La chaîne Youtube : https://www.youtube.com/channel/UChAv6B ... 1J7oDf-W1w
Les photos du cockpit : https://photos.app.goo.gl/BqyyyjkKzo2ZjdoF9
Re: Construction du Pit à Myoda
#108Chez moi le fichier téléchargé ne veut pas s'ouvrir.
Voila ce que cela donne.
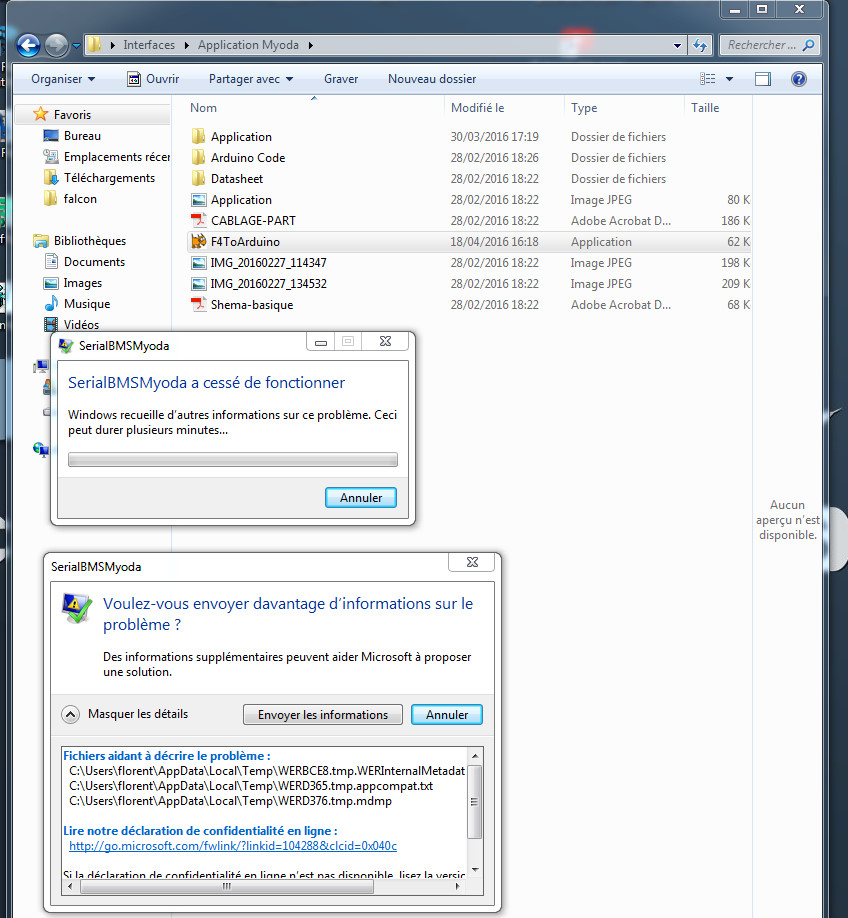
Une petite idée ?
Repman
Voila ce que cela donne.
Une petite idée ?
Repman
TrackIR V4 + TrackClip Pro / HOTAS Cougar - FFSB R1 - Throttle effet Hall/ Beyerdynamic MMX300 / MSI Z97 gaming 5/ Nvidia Gigabyte GTX 1080Ti / Intel core i5-4690K / Windows 10 / RAM DDR3 32GB / SSD Samsung 840 Pro 256 Go
Re: Construction du Pit à Myoda
#109Merde le copain a eut ça aussi ! je pensais que c’était isolé !
Ata je regarde :-)
Ata je regarde :-)
L'histoire du pit sur Checksix : viewtopic.php?f=286&t=192908
Télécharger mon programme : http://f4toserial.com
La chaîne Youtube : https://www.youtube.com/channel/UChAv6B ... 1J7oDf-W1w
Les photos du cockpit : https://photos.app.goo.gl/BqyyyjkKzo2ZjdoF9
Télécharger mon programme : http://f4toserial.com
La chaîne Youtube : https://www.youtube.com/channel/UChAv6B ... 1J7oDf-W1w
Les photos du cockpit : https://photos.app.goo.gl/BqyyyjkKzo2ZjdoF9
Re: Construction du Pit à Myoda
#110Coucou,
Je peux te demander si tu peux re-télécharger le programme F4ToArduino.exe et F4SharedMem.dll stp ?
J'ai fais des modifications ! Voir si ca marche.
Si tu as le problème, copie-colle pour moi le message d'erreur complet ici stp
Je peux te demander si tu peux re-télécharger le programme F4ToArduino.exe et F4SharedMem.dll stp ?
J'ai fais des modifications ! Voir si ca marche.
Si tu as le problème, copie-colle pour moi le message d'erreur complet ici stp
L'histoire du pit sur Checksix : viewtopic.php?f=286&t=192908
Télécharger mon programme : http://f4toserial.com
La chaîne Youtube : https://www.youtube.com/channel/UChAv6B ... 1J7oDf-W1w
Les photos du cockpit : https://photos.app.goo.gl/BqyyyjkKzo2ZjdoF9
Télécharger mon programme : http://f4toserial.com
La chaîne Youtube : https://www.youtube.com/channel/UChAv6B ... 1J7oDf-W1w
Les photos du cockpit : https://photos.app.goo.gl/BqyyyjkKzo2ZjdoF9
Re: Construction du Pit à Myoda
#111Moi le telechargement et l'ouverture de F4toArduino c'est ok . Mais quand je lance le programme les moteurs ne tournent plus....
Re: Construction du Pit à Myoda
#112C'est très bizarre ce que tu me dis !Poker a écrit :Moi le telechargement et l'ouverture de F4toArduino c'est ok . Mais quand je lance le programme les moteurs ne tournent plus....
Est-ce que les données des moteurs sont bien sélectionnés ?
As-tu mis le code arduino à jour ?
Les sorties sont elles toujours les mêmes sur ta carte ?
Tiens moi au courant ! Navré pour la gêne !
L'histoire du pit sur Checksix : viewtopic.php?f=286&t=192908
Télécharger mon programme : http://f4toserial.com
La chaîne Youtube : https://www.youtube.com/channel/UChAv6B ... 1J7oDf-W1w
Les photos du cockpit : https://photos.app.goo.gl/BqyyyjkKzo2ZjdoF9
Télécharger mon programme : http://f4toserial.com
La chaîne Youtube : https://www.youtube.com/channel/UChAv6B ... 1J7oDf-W1w
Les photos du cockpit : https://photos.app.goo.gl/BqyyyjkKzo2ZjdoF9
Re: Construction du Pit à Myoda
#113Salut,
Alors premièrement ne soit surtout pas désolé pour la gêne !!! Tu sors un prog qui va être au top dans pas longtemps.
J'ai reussi a refaire fonctionner les moteurs , j'ai remarquer que si je ne coche qu'une valeur (RPM par exemple) rien ne se passe si je coches plusieurs valeurs là ça marche c'est vraiment bizarre ...
De plus un autre "problème" qui est présent depuis le debut:
Je prends par ex la jauge EPU. Le moteur s initialise ok et s'arrête sur zéro .Dans le jeu lorsque je met les batteries ON la jauge monte a 100% mais pas en une fois ,elle fait de nombreux allez retour comme pour rechercher une position pour enfin s'arrêter a 100%. Là je lance l'EPU et la jauge descent doucement ok. Ensuite je remets batteries OFF et idem de nombreux aller retour avant de se mettre en position zéro.
Sur les autres jauges c'est pareil lorsque les valeurs doivent passer rapidement de 0 a 100. Si l'incrementation se fait lentement pas de problèmes. C'est peut être un soucis lié a la librairie switec mais j'arrive toujours pas a tester avec accelstepper ....help me.
Derniere petit requête la jauge altimètre pressure ,tu peux la rajouter please
Encore merci pour le travail accompli
Poker bêta testeur F4toarduino
Alors premièrement ne soit surtout pas désolé pour la gêne !!! Tu sors un prog qui va être au top dans pas longtemps.
J'ai reussi a refaire fonctionner les moteurs , j'ai remarquer que si je ne coche qu'une valeur (RPM par exemple) rien ne se passe si je coches plusieurs valeurs là ça marche c'est vraiment bizarre ...
De plus un autre "problème" qui est présent depuis le debut:
Je prends par ex la jauge EPU. Le moteur s initialise ok et s'arrête sur zéro .Dans le jeu lorsque je met les batteries ON la jauge monte a 100% mais pas en une fois ,elle fait de nombreux allez retour comme pour rechercher une position pour enfin s'arrêter a 100%. Là je lance l'EPU et la jauge descent doucement ok. Ensuite je remets batteries OFF et idem de nombreux aller retour avant de se mettre en position zéro.
Sur les autres jauges c'est pareil lorsque les valeurs doivent passer rapidement de 0 a 100. Si l'incrementation se fait lentement pas de problèmes. C'est peut être un soucis lié a la librairie switec mais j'arrive toujours pas a tester avec accelstepper
Derniere petit requête la jauge altimètre pressure ,tu peux la rajouter please
Encore merci pour le travail accompli
Poker bêta testeur F4toarduino
Re: Construction du Pit à Myoda
#114Salut a tous,
Apres avoir re-télécharger l'ensemble l'application démarre
1/ Je viens de refaire un test avec les RPM qui fonctionnent avec toujours le problème de fluidité.
2/ j'ai affecté dans le code les pin de la carte arduino uno des RPM (6.7.8.9 pour moi) au FTIT puis NOZPOS mais rien ne se passe le moteur ne tourne pas
-je sélectionne bien la fonction dans F4toARDUINO et la valeur sélectionné s'affiches correctement.
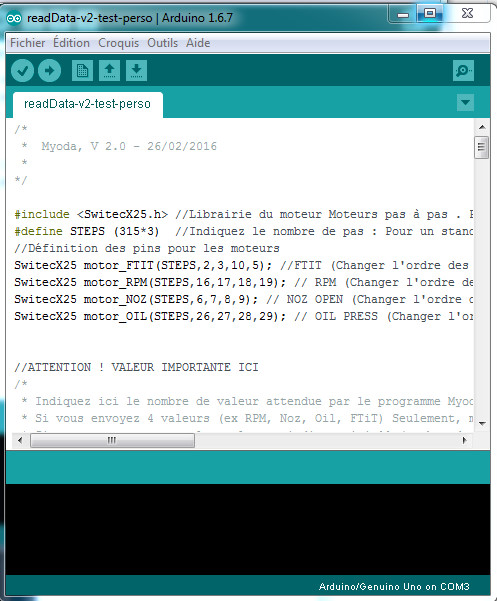
3/ Le code Arduino a-t-il changer ? j'ai la Readata-V2
Une petite idée ?
Repman
Apres avoir re-télécharger l'ensemble l'application démarre
1/ Je viens de refaire un test avec les RPM qui fonctionnent avec toujours le problème de fluidité.
2/ j'ai affecté dans le code les pin de la carte arduino uno des RPM (6.7.8.9 pour moi) au FTIT puis NOZPOS mais rien ne se passe le moteur ne tourne pas
-je sélectionne bien la fonction dans F4toARDUINO et la valeur sélectionné s'affiches correctement.
3/ Le code Arduino a-t-il changer ? j'ai la Readata-V2
Une petite idée ?
Repman
TrackIR V4 + TrackClip Pro / HOTAS Cougar - FFSB R1 - Throttle effet Hall/ Beyerdynamic MMX300 / MSI Z97 gaming 5/ Nvidia Gigabyte GTX 1080Ti / Intel core i5-4690K / Windows 10 / RAM DDR3 32GB / SSD Samsung 840 Pro 256 Go
Re: Construction du Pit à Myoda
#115repman a écrit :Salut a tous,
Apres avoir re-télécharger l'ensemble l'application démarre
1/ Je viens de refaire un test avec les RPM qui fonctionnent avec toujours le problème de fluidité.
2/ j'ai affecté dans le code les pin de la carte arduino uno des RPM (6.7.8.9 pour moi) au FTIT puis NOZPOS mais rien ne se passe le moteur ne tourne pas
-je sélectionne bien la fonction dans F4toARDUINO et la valeur sélectionné s'affiches correctement.
3/ Le code Arduino a-t-il changer ? j'ai la Readata-V2
Une petite idée ?
Repman
Salut Rep,
Dsl pour le retard, pas mal débordé ces temps-ci !
Alors ce qui à changé c'est surtout dans la partie
Code : Tout sélectionner
String CAUTION_C_ADC = getValue(split, ';', 2); // !!!!!!! REMPLACER [ 0 ] par le ....Si par exemple tu envoies les RPM en 3 ême position après la virgule, il en vas de même pour la récupération !
Normalement le programme le fait automatiquement, mais cela ne semble pas fonctionner.
Je n'ai pas testé cette partie la ! je vais le faire ce matin pour m'assurer que tout fonctionne !
L'histoire du pit sur Checksix : viewtopic.php?f=286&t=192908
Télécharger mon programme : http://f4toserial.com
La chaîne Youtube : https://www.youtube.com/channel/UChAv6B ... 1J7oDf-W1w
Les photos du cockpit : https://photos.app.goo.gl/BqyyyjkKzo2ZjdoF9
Télécharger mon programme : http://f4toserial.com
La chaîne Youtube : https://www.youtube.com/channel/UChAv6B ... 1J7oDf-W1w
Les photos du cockpit : https://photos.app.goo.gl/BqyyyjkKzo2ZjdoF9
Re: Construction du Pit à Myoda
#116Alors je confirme, ça fonctionne mais par contre, il y a bien une petite erreur !
Dans l'ordre :
1 - Sélectionner une vitesse de 600 Bauds, (au moins pour les tests)
2 - Sélectionner les valeurs à envoyer (exemple, RPM, FTIT)
3 - Vérifier dans la partie Falcon 4 BMS Data Send qu'on a bien X valeurs envoyées
4 - Aller sur l'onglet Arduino Code puis cliquer sur Générer
5 - Appuyer sur Copy Code et coller le résultat dans la fenêtre de l'éditeur Arduino
6 - Vérifier les valeurs :
int attendu = 2;
Serial.begin(600);
String RPM = getValue(split, ';', 0);
Attention, c'est la ou il y a une erreur ! la première valeur commence à 0 et non à 1 !
Si on envoie 2 valeurs, ex : RPM et FTIT, alors la première sera :
String RPM = getValue(split, ';', 0);
et la deuxième :
String FTIT = getValue(split, ';', 1);
Compiler et lancer !
Normalement ça fonctionne ! Chez moi en c'est bon, j'ai mis un ecran pour vérifier en plus des moteurs !

Dans l'ordre :
1 - Sélectionner une vitesse de 600 Bauds, (au moins pour les tests)
2 - Sélectionner les valeurs à envoyer (exemple, RPM, FTIT)
3 - Vérifier dans la partie Falcon 4 BMS Data Send qu'on a bien X valeurs envoyées
4 - Aller sur l'onglet Arduino Code puis cliquer sur Générer
5 - Appuyer sur Copy Code et coller le résultat dans la fenêtre de l'éditeur Arduino
6 - Vérifier les valeurs :
int attendu = 2;
Serial.begin(600);
String RPM = getValue(split, ';', 0);
Attention, c'est la ou il y a une erreur ! la première valeur commence à 0 et non à 1 !
Si on envoie 2 valeurs, ex : RPM et FTIT, alors la première sera :
String RPM = getValue(split, ';', 0);
et la deuxième :
String FTIT = getValue(split, ';', 1);
Compiler et lancer !
Normalement ça fonctionne ! Chez moi en c'est bon, j'ai mis un ecran pour vérifier en plus des moteurs !
L'histoire du pit sur Checksix : viewtopic.php?f=286&t=192908
Télécharger mon programme : http://f4toserial.com
La chaîne Youtube : https://www.youtube.com/channel/UChAv6B ... 1J7oDf-W1w
Les photos du cockpit : https://photos.app.goo.gl/BqyyyjkKzo2ZjdoF9
Télécharger mon programme : http://f4toserial.com
La chaîne Youtube : https://www.youtube.com/channel/UChAv6B ... 1J7oDf-W1w
Les photos du cockpit : https://photos.app.goo.gl/BqyyyjkKzo2ZjdoF9
Re: Construction du Pit à Myoda
#117Salut Myoda,
Pas de soucis pour le délai.
J'ai compris le principe et cela fonctionne
Concernant le problème de manque de fluidité des aiguilles.
si j'ai bien compris:
1- tu envois la valeur que le moteur doit atteindre
2- la librairie arduino fait monter le moteur jusqu'à cette valeur puis retour à l'étape 1
et donc tu ne contrôle pas la vitesse de déplacement de l'aiguille du moteur puisque c'est la librairie qui sent charge.
Une idée de néophyte:
1- tu compare la valeur actuel afficher par le moteur avec la valeur lu dans falcon (ex: RPM falcon70%-moteur affiche 5%)
2- si le résultat est positif, tu fais monter la valeur envoyé nom pas directement a 70%, mais tu incrémentes la valeur afficher par le moteur de X% (0.1%par exemple) suivi d'une petite pose de X millisecondes jusqu'à atteindre l'objectif qui est de 70%.
comme ca tu control la vitesse à laquelle monte ou descend l'aiguille
Je sais pas si je suis claire
Repman
Pas de soucis pour le délai.
J'ai compris le principe et cela fonctionne
Concernant le problème de manque de fluidité des aiguilles.
si j'ai bien compris:
1- tu envois la valeur que le moteur doit atteindre
2- la librairie arduino fait monter le moteur jusqu'à cette valeur puis retour à l'étape 1
et donc tu ne contrôle pas la vitesse de déplacement de l'aiguille du moteur puisque c'est la librairie qui sent charge.
Une idée de néophyte:
1- tu compare la valeur actuel afficher par le moteur avec la valeur lu dans falcon (ex: RPM falcon70%-moteur affiche 5%)
2- si le résultat est positif, tu fais monter la valeur envoyé nom pas directement a 70%, mais tu incrémentes la valeur afficher par le moteur de X% (0.1%par exemple) suivi d'une petite pose de X millisecondes jusqu'à atteindre l'objectif qui est de 70%.
comme ca tu control la vitesse à laquelle monte ou descend l'aiguille
Je sais pas si je suis claire
Repman
TrackIR V4 + TrackClip Pro / HOTAS Cougar - FFSB R1 - Throttle effet Hall/ Beyerdynamic MMX300 / MSI Z97 gaming 5/ Nvidia Gigabyte GTX 1080Ti / Intel core i5-4690K / Windows 10 / RAM DDR3 32GB / SSD Samsung 840 Pro 256 Go

Re: Construction du Pit à Myoda
#118Salut Myoda, je suis également super emballé par les projets arduino ! Ton programme est génial.
Pense tu qu'il est possible d'utiliser des arduino pour connecter les entrées interrupteurs ?
Envoyé de mon iPhone en utilisant Tapatalk
Pense tu qu'il est possible d'utiliser des arduino pour connecter les entrées interrupteurs ?
Envoyé de mon iPhone en utilisant Tapatalk
Grome88
Pierrat Jérôme.

Pierrat Jérôme.
Re: Construction du Pit à Myoda
#119Salut Myoda,
En effet après ta petite modif les moteurs reprennent vie ! Cool..
Merci
En effet après ta petite modif les moteurs reprennent vie ! Cool..
Merci
Re: Construction du Pit à Myoda
#120Coucou,repman a écrit :Salut Myoda,
Pas de soucis pour le délai.
J'ai compris le principe et cela fonctionne
Concernant le problème de manque de fluidité des aiguilles.
si j'ai bien compris:
1- tu envois la valeur que le moteur doit atteindre
2- la librairie arduino fait monter le moteur jusqu'à cette valeur puis retour à l'étape 1
et donc tu ne contrôle pas la vitesse de déplacement de l'aiguille du moteur puisque c'est la librairie qui sent charge.
Une idée de néophyte:
1- tu compare la valeur actuel afficher par le moteur avec la valeur lu dans falcon (ex: RPM falcon70%-moteur affiche 5%)
2- si le résultat est positif, tu fais monter la valeur envoyé nom pas directement a 70%, mais tu incrémentes la valeur afficher par le moteur de X% (0.1%par exemple) suivi d'une petite pose de X millisecondes jusqu'à atteindre l'objectif qui est de 70%.
comme ca tu control la vitesse à laquelle monte ou descend l'aiguille
Je sais pas si je suis claire
Repman
merci pour ta réponse ! Alors en théorie oui, mais en pratique, c'est plus complexe que ça !
En faite la librairie SwitecX25.h travaille j'imagine en verrouillant la position du moteur pendant son déplacement !
J'ai déjà essayé en ajoutant des pourcentages de valeurs comme tu le préconises.
Le souci, c'est que si les valeurs envoyés à la carte Arduino augmentent ou chutent brutalement, le moteur en revanche devra toutes les traiter dans l'ordre d'arrivée, car SwitecX25.h créé une espèce de "queue" ou "tasklist" de travail en attente à effectuer par le moteur ! Donc du coup, le moteur n'est plus synchronisé avec BMS ! et le décalage s'accentue en fonction de l'activité !
A l'heure actuelle, je ne suis pas assez fort en math pour effectuer des calculs logarithmiques pour déplacer l'aiguille, mais grosso modo le principe est bien celui que tu décris sauf que le faire sans librairie est plus complexe que prévu !
La solution Accellstepper règle le problème, mais l'inconvénient, c'est que cette librairie n'est pas compatible avec plusieurs moteurs ! Et c'est bien logique, car comme je l'ai décris plus haut, en faisant cela, l'ensemble de la loop (boucle) Arduino qui est affecté ! Il faut donc créer un système de thread indépendant pour résoudre le problème ! Sauf que c'est pas le cas sur Arduino pour l'instant !
Je n'ai pas été chercher si il y avait des solutions ou des mises à jours de ce côté, car le programme est fonctionnel ! Je promet que je m'y remet bientôt et que je reviens avec une solution, mais pour l'instant, je suis concentré sur le HUD. J'ai commencé depuis quelques jours et les résultats sont prometteurs ! J'AI UN VRAIS HUD A LA MAISON !
F4toArduino fonctionne comme F4ToPokeys ! L'interface vas pour l'instant dans un seul sens ! PC --> Arduino !Grome88 a écrit :Salut Myoda, je suis également super emballé par les projets arduino ! Ton programme est génial.
Pense tu qu'il est possible d'utiliser des arduino pour connecter les entrées interrupteurs ?
Envoyé de mon iPhone en utilisant Tapatalk
Pour faire l'inverse, il faut un système de "dialogue" entre le pc et la carte avec un truc du genre "baton de parole" pour éviter les collisions d'infos !
Pour l'instant, je ne me suis pas du tout intéressé à cet aspect pour une raison simple : la carte Pokeys le fait déjà très bien le job (En dehors des matrix qui m'ont fait pété un câble
En revanche, j'ai reçu une carte Raspberry Pi 3 et je vais commencer à orienter mes recherches avec ! C'est un mini ordinateurs très puissant, qui permettra d'échanger avec le pc principal des infos ! il existe plein de chieds pour ca ! Le souci, c'est que c'est pour linux ! et Falcon 4 jusqu'à nouvel ordre n'est pas compatible, ou du moins on peux pas lancer d’exécutable !
Super content que ça marche ! n'hésitez pas à me faire remonter d'autres infos !Poker a écrit :Salut Myoda,
En effet après ta petite modif les moteurs reprennent vie ! Cool..
Merci
L'histoire du pit sur Checksix : viewtopic.php?f=286&t=192908
Télécharger mon programme : http://f4toserial.com
La chaîne Youtube : https://www.youtube.com/channel/UChAv6B ... 1J7oDf-W1w
Les photos du cockpit : https://photos.app.goo.gl/BqyyyjkKzo2ZjdoF9
Télécharger mon programme : http://f4toserial.com
La chaîne Youtube : https://www.youtube.com/channel/UChAv6B ... 1J7oDf-W1w
Les photos du cockpit : https://photos.app.goo.gl/BqyyyjkKzo2ZjdoF9
Re: Construction du Pit à Myoda
#121Coucou,
Je vous présente la beta du HUD ! encore beaucoup de réglages, beaucoup de travail et d’ajustement, mais on y arrive doucement !
Bref, l'image que j'ai prise avec le tel est sacrément floue, (faut tenir le téléphone, et la vitre sans trembler ... ) mais quand je suis devant c'est déjà sacrément lisible !!!
EDIT :
Juste en dessous !
Je vous présente la beta du HUD ! encore beaucoup de réglages, beaucoup de travail et d’ajustement, mais on y arrive doucement !
Bref, l'image que j'ai prise avec le tel est sacrément floue, (faut tenir le téléphone, et la vitre sans trembler ... ) mais quand je suis devant c'est déjà sacrément lisible !!!
EDIT :
Juste en dessous !
Dernière modification par Myoda le mar. avr. 26, 2016 11:30 am, modifié 1 fois.
L'histoire du pit sur Checksix : viewtopic.php?f=286&t=192908
Télécharger mon programme : http://f4toserial.com
La chaîne Youtube : https://www.youtube.com/channel/UChAv6B ... 1J7oDf-W1w
Les photos du cockpit : https://photos.app.goo.gl/BqyyyjkKzo2ZjdoF9
Télécharger mon programme : http://f4toserial.com
La chaîne Youtube : https://www.youtube.com/channel/UChAv6B ... 1J7oDf-W1w
Les photos du cockpit : https://photos.app.goo.gl/BqyyyjkKzo2ZjdoF9
Re: Construction du Pit à Myoda
#122Pas de photo...:-(
Core i5-4690K @ 3.5 GHz - 8Go RAM - Carte graphique GTX 970 - (Cougar + FSSB) - TPR - W10 64bits sur SSD - EdTracker - Un pit
Re: Construction du Pit à Myoda
#124Chelou ca, pour moi elle s'affichent !
Voila !


Voila !
L'histoire du pit sur Checksix : viewtopic.php?f=286&t=192908
Télécharger mon programme : http://f4toserial.com
La chaîne Youtube : https://www.youtube.com/channel/UChAv6B ... 1J7oDf-W1w
Les photos du cockpit : https://photos.app.goo.gl/BqyyyjkKzo2ZjdoF9
Télécharger mon programme : http://f4toserial.com
La chaîne Youtube : https://www.youtube.com/channel/UChAv6B ... 1J7oDf-W1w
Les photos du cockpit : https://photos.app.goo.gl/BqyyyjkKzo2ZjdoF9
Re: Construction du Pit à Myoda
#125Ça promet de grande chose !! Félicitations
Envoyé de mon iPhone en utilisant Tapatalk
Envoyé de mon iPhone en utilisant Tapatalk
Grome88
Pierrat Jérôme.
Pierrat Jérôme.